RC Kart
Control the kart using a Joystick sensor or via an IoT platform.
Building Instructions
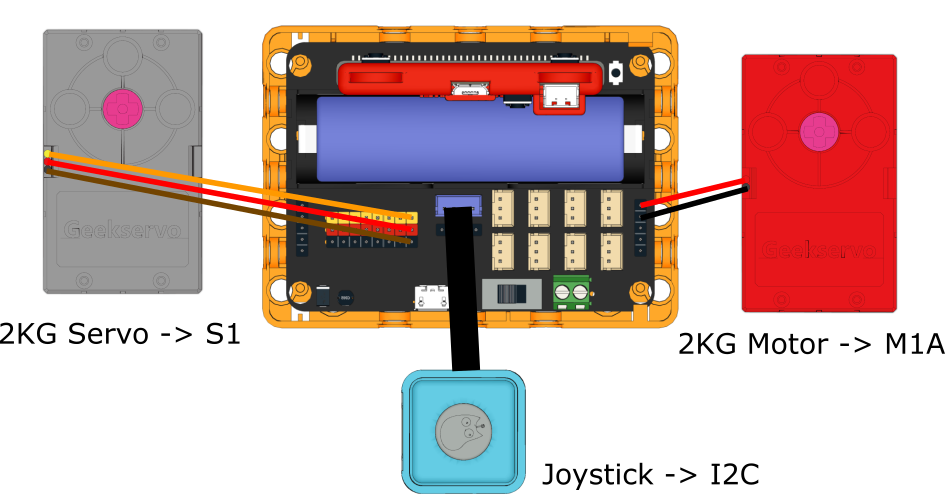
Sample Wiring Diagram
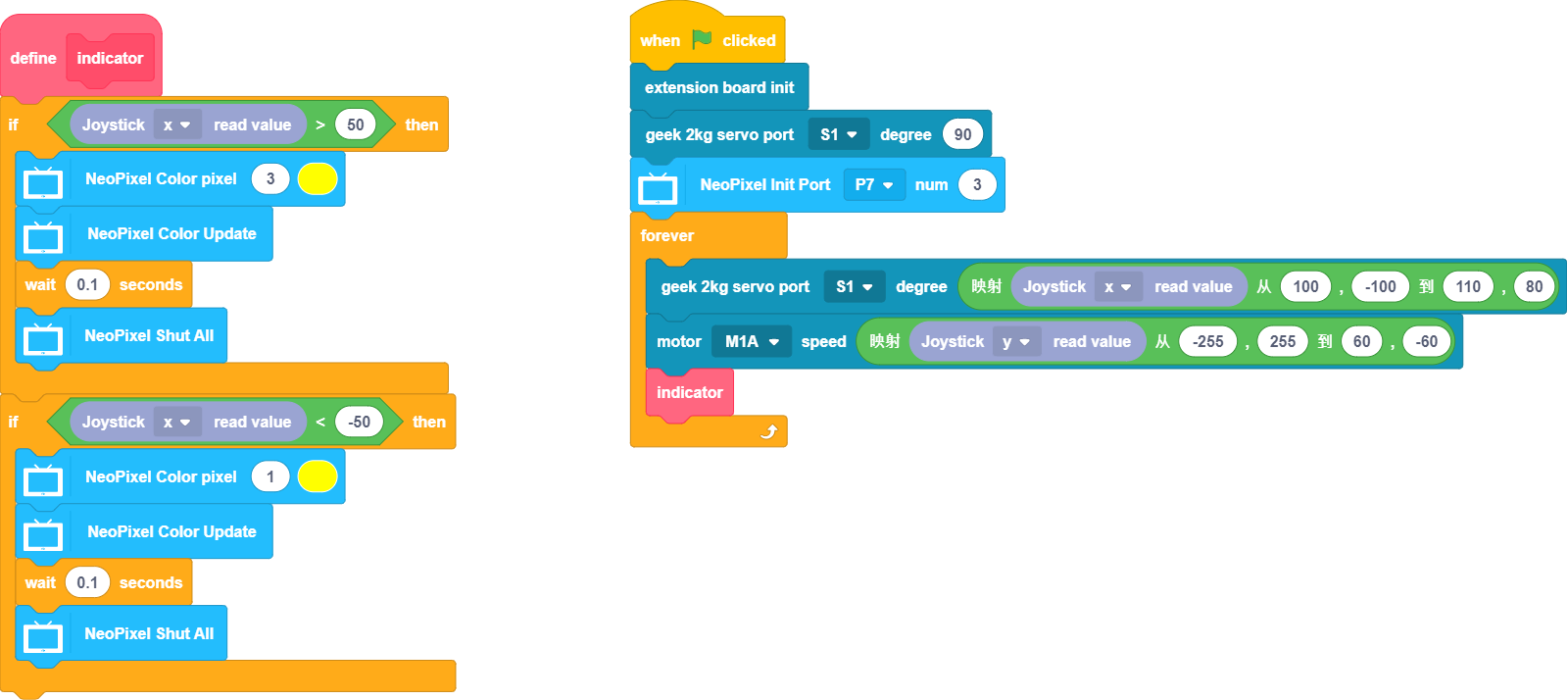
Sample Program
KittenBlock Sample Program
[Download Sample Program(Right Click->Save As)](https://github.com/kittenbothk/kittenbothk/raw/master/Kits/future_inventor/Programming Case/sb3/rc%20kart.sb3)
Python參考程式
#/bin/python
from time import sleep
from future import *
from sugar import *
import robotbit
x = 0
y = 0
def indicator():
global x,y
if Joystick().value('x') > 50:
neopix.setColor(2, (255, 255, 0))
neopix.update()
sleep(0.1)
neopix.setColorAll((0,0,0))
if Joystick().value('x') < -50:
neopix.setColor(0, (255, 255, 0))
neopix.update()
sleep(0.1)
neopix.setColorAll((0,0,0))
def valmap(x, in_min, in_max, out_min, out_max):
return int((x-in_min) * (out_max-out_min) / (in_max-in_min) + out_min)
robot = robotbit.RobotBit()
robot.geekServo2kg(1, 90)
neopix=NeoPixel("P7",3)
while True:
robot.geekServo2kg(1, valmap(Joystick().value('x'), 100, -100, 110, 80))
robot.motor(1,valmap(Joystick().value('y'), -255, 255, 60, -60))
indicator()
[Download Sample Program(Right Click->Save As)](https://github.com/kittenbothk/kittenbothk/raw/master/Kits/future_inventor/Programming Case/py/kart.py)
Program Instructions
Push the joystick to control the rc kart. The indicators will light up when steering.